Mots clés: demande stochastique, la théorie des files d’attente, optimisation.
Dans le cadre d'un stage de recherche au LIMOS durant mon master en genie industriel à l'ISIMA, j'ai consideré le dimensionnement d’un système industriel en vue d’atteindre un certain niveau de service au coût minimum. Ce stage a été encadré par Jean-Philippe Gayon. L'objectif du problème est de trouver un moyen d'optimiser le nombre de véhicules guidés automatisés pour atteindre la performance donnée, compte tenu de la nature stochastique de la demande et du service. À l'aide de la théorie des files d’attente pour un temps de service exponentiel, j'ai appliqué deux approches pour trouver le nombre minimum de véhicules afin de garantir un temps d'attente borné par un paramètre d'entrée. Ensuite, deux logiciels de simulation (QTS Plus et Simio) ont été testés afin de sélectionner celui qui donnait les résultats les plus proches des formules analytiques. Enfin, j'ai fait une comparaison de QTS Plus avec une formule d'approximation puis j'ai pu conclure que la formule d'approximation choisie est fiable. Je l'ai appliqué à des systèmes qui admettent des temps de service variés pour optimiser le nombre de robots sous la condition du temps d'attente limité.Travaux de thèse
Mots clés: logistique, robots coopératifs, reconfigurabilité, programmation mathématique, analyse de complexité, optimisation discrete.
Le doctorat a été effectué au laboratoire LIMOS, à l'Université Clermont Auvergne (UCA) sous la direction de Jean-Philippe Gayon, professeur à l’ISIMA, et l'encadrement de Jean-Christophe Fauroux et Zine Elabidine Chebab, fondateurs de l'entreprise MecaBotiX et chercheurs associés de l’Institut Pascal.
Le sujet du doctorat concerne l'intralogistique d'un système industriel comprenant plusieurs entités robotiques, mobiles et coopératives. Le but est de transporter des charges d'une zone de l'entrepôt à une autre zone par des robots reconfigurables. Les robots reconfigurables, nommés poly-robots, sont constitués de robots élémentaires qui sont agrégés afin d'effectuer conjointement une tâche comme un seul robot. La figure montre un exemple de reconfiguration d'un 3-bot et d'un 2-bot en un 4-bot et un 1-bot (R_i désigne le i-ième robot élémentaire) :
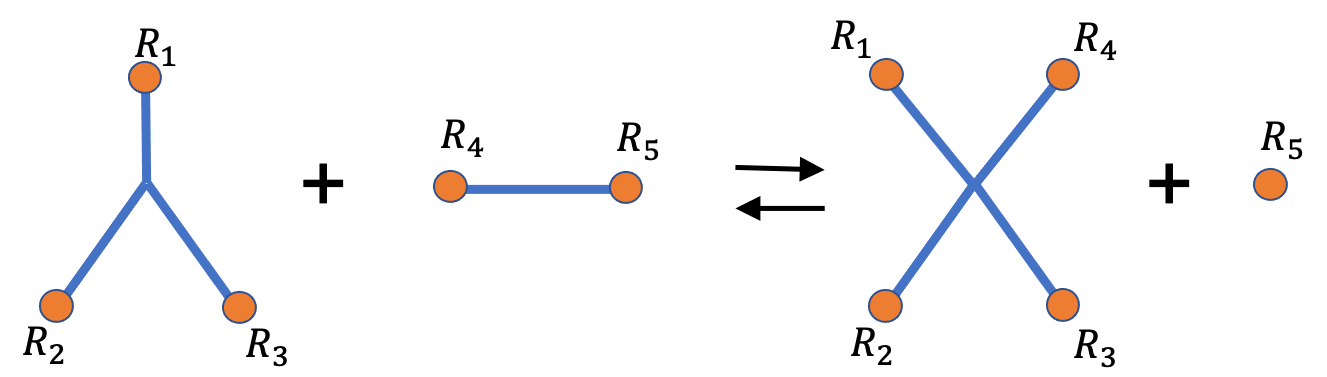
Après chaque transport, les poly-robots peuvent être reconfigurés pour s'adapter au type de charge. La capacité du poly-robot dépend de la configuration et du type de charge.
L'objectif, dans un premier temps, est de déterminer le nombre de robots élémentaires nécessaires pour déplacer un ensemble de charges dans un horizon de temps spécifié au coût minimum. Dans un second temps, le but est de minimiser le temps de transport de toutes les charges avec un nombre de robots élémentaires donné.
Résultat 1. Le premier cadre mathématique déterministe est développé pour le dimensionnement d'une flotte de robots reconfigurables. Le modèle mathématique sous la forme d'un PLNE (programme linéaire en nombres entiers) permet de comparer le coût d'une flotte de robots avec et sans possibilité de reconfiguration.
Résultat 2. Dans les cas particulières (avec deux types de charges, deux configurations et avec des capacités unitaires), des expressions de forme analytique sont dérivées, grâce auxquelles nous prouvons des théorèmes sur les limites de rentabilité d'une flotte reconfigurable.
Résultat 3. Dans le cas général, nous prouvons que la reconfigurabilité peut diviser le nombre minimum de robots élémentaires jusqu'à un facteur K (avec K le nombre de types de charges).
Résultat 4. Nous montrons que le problème formulé est fortement NP-difficile. Dans trois cas particuliers (une seule période, un seul type de charge ou une seule configuration), le problème peut être résolu en temps polynomial avec des algorithmes de programmation dynamique appropriés.
Résultat 5. Un algorithme heuristique efficace est proposé. Une étude numérique montre que l'algorithme heuristique peut être appliqué avec succès même pour de grandes instances et a de bonnes performances sur les instances testées.
Résultat 6. Une formulation mathématique du problème d’ordonnancement est proposée. Nous montrons que la reconfigurabilité peut réduire considérablement la durée du transport lorsque les zones de dépôt des charges sont situées à différents endroits.
Recherche post-doctorale
Mots clés: système manufacturier reconfigurable, durabilité, convertibilité, cycle de vie, optimisation multi-objectif.
N'hésitez pas à consulter les articles et à me contacter pour en savoir plus sur la recherche.
J'ai été recrutée à partir du 16/10/2023 comme post-doctorante à l'Institut Mines-Télécom Atlantique dans l'equipe Modélisation, Optimisation et DEcision pour la Logistique, l'Industrie et les Services (MODELIS) sous la responsabilite scientifique d'Audrey Cerqueus et d'Alexandre Dolgui.
Je travaille actuellement sur le modèle pour la phase de conception de système manufacturier reconfigurable, qui optimise à la fois sa convertibilité, pour prolonger son cycle de vie, et son coût pour rester compétitif. La convertibilité est évaluée sur trois décisions : le type des machines, le type des systèmes de transport et le nombre de connexions entre les stations. Un compromis entre la convertibilité et le coût est recherché puisque les machines et systèmes de transport flexibles sont plus coûteux à l'achat que des machines et systèmes de transports dédiés. La configuration physique (c'est-à-dire le nombre de machines sur chaque poste de travail) affecte la vitesse d'introduction des changements dans le système : une augmentation du nombre de connexions augmente la convertibilité. Le problème est formulé comme un programme linéaire bi-objectif.
Recherche précédant le doctorat
-

E-mail :
prenom.nom@imt-atlantique.fr
Articles
- 2023 ROADEF 24ème congrès annuel de la Société Française de Recherche Opérationnelle et d'Aide à la Décision
- 2022 IEEE 18th International Conference on Automation Science and Engineering
(CASE) - 2022 ROADEF 23ème congrès annuel de la Société Française de Recherche Opérationnelle et d'Aide à la Décision
- 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE)
- 2021 ROADEF 22ème congrès de la société Française de Recherche Opérationnelle et d’Aide à la Décision
- Minimisation du nombre de robots coopératifs et reconfigurables pour le transport de charges hétérogènes/a>
- Sizing of a fleet of cooperative and reconfigurable robots for the transport of heterogeneous loads
- Dimensionnement d'une flotte de robots coopératifs et reconfigurables pour le transport de charges hétérogènes
- Sizing of a fleet of cooperative robots for the transport of homogeneous loads
- Dimensionnement d’une flotte de robots coopératifs pour le transport de charges homogènes