Instances for the
|
|
Problem definition :
|
|
| Example of problem and of one solution: |
| Input buffer capacity = 2 (for all machines) Output buffer capacity = 2 (for all machines) Loaded time=unloaded time = 1 The maximal nomber of job in the system = 2 Type of job: job 1: M1(0), M2(8), M3(16), M5(12), M6(0) job 2: M1(0), M2(20), M4(10), M3(18), M6(0) job 3: M1(0), M4(12), M5(8), M2(15), M6(0) |
Transportation time matrix for both loaded and empty trips: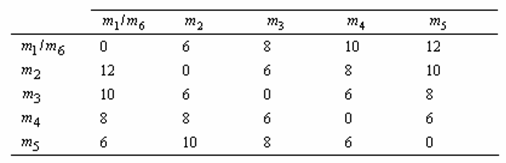 |
| First MILP formulation provided by [2]. |
First representation : 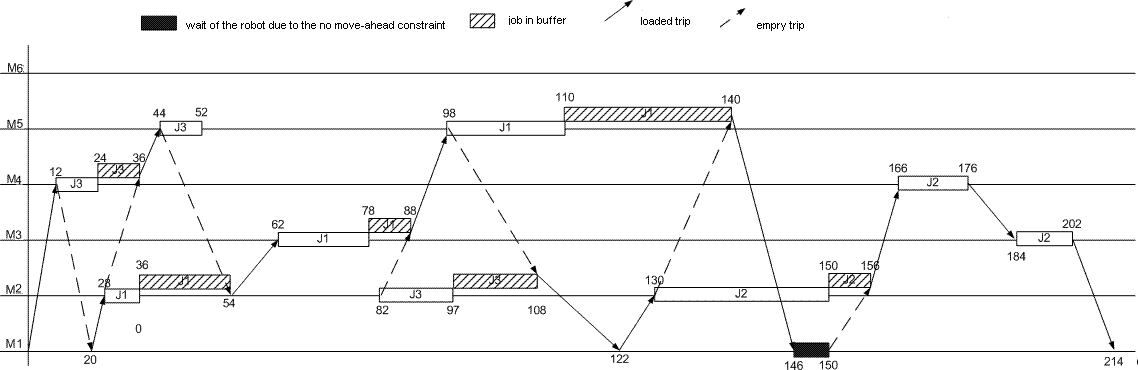 |
Second representation : 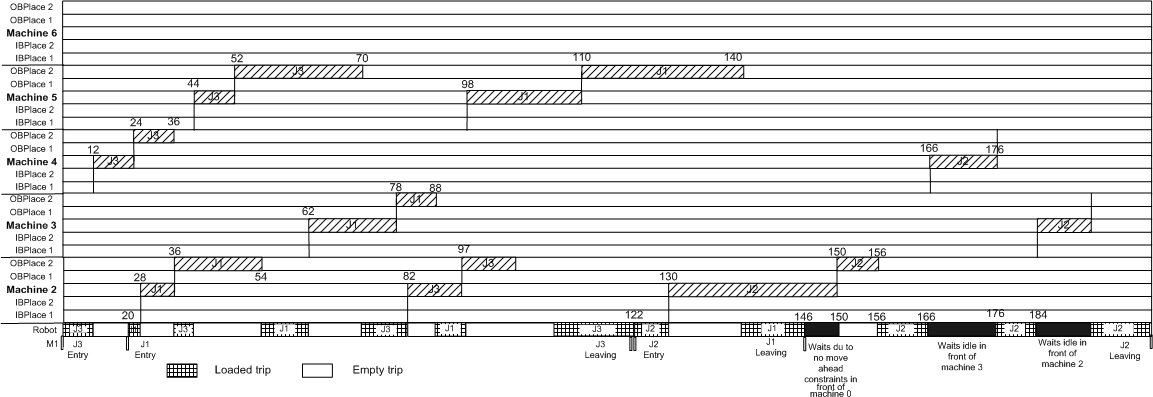 |
| Instances: download |
| Instances format : | 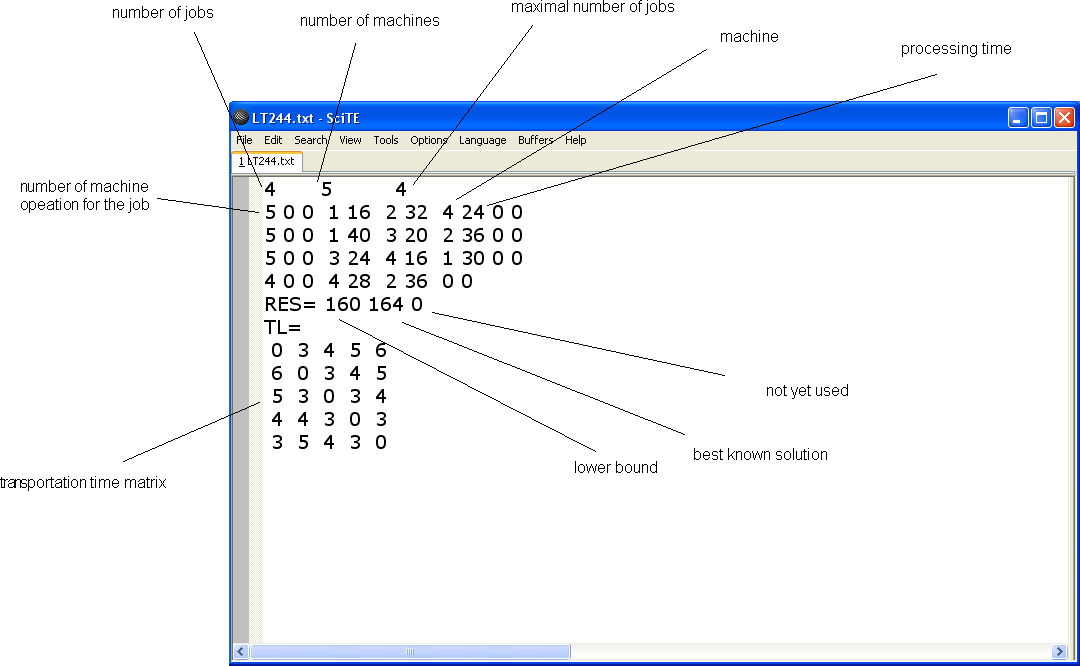 |
| Remark : both loaded transportation time and empty transportation time are assumed to be identical |
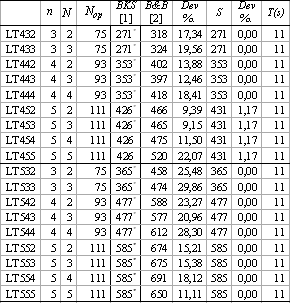
| Best known solutions: |
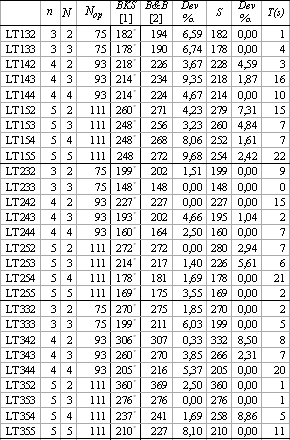 |
 |
| References: |
|
[1]
Lacomme P., Moukrim A. and Tchernev N., “Simultaneously Job Input
Sequencing and Vehicle Dispatching in a Single Vehicle AGVS: a Heuristic Branch
and Bound Approach Coupled with a Discrete Events Simulation Model”,
International Journal of Production Research, vol 43(9), p. 1911-1942, 2005.
(see journal) [2]
Caumond, A., Lacomme P., Moukrim A. and Tchernev N.,”A MILP for
scheduling problems in an FMS with one vehicle”, submitted to European Journal
of Operational Research, 2006. [3]
Lacomme P. and N. Tchernev, "Resolution of a Job-Shop Problem with a
Single Transport Robot and Buffer Facilities". Submitted to International
Conference on Service Systems and Service Management. Troyes, October 25-27,
2006. (see web server) |